Auxiliar 10
Colisiones
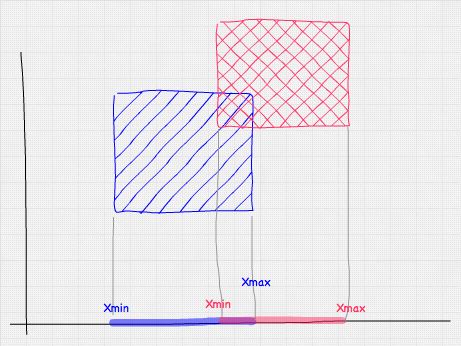
Axis aligned bounding boxes
- Consiste en una caja alineada a los ejes \(XYZ\)
- Se puede definir por dos puntos: el \(min\) y el \(max\)
- Colisión fácil de computar y manejar
- Se usa los intervalos definidos por \(min\) y \(max\) en cada eje para calcular la colisión
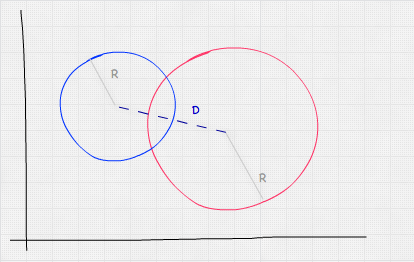
Sphere
- Consiste en una esfera definida por el centro y su radio
- También es fácil de computar y manejar
- No suele adaptarse bien a todos los casos
- Se usa la distancia al centro y el radio para calcular la colisión
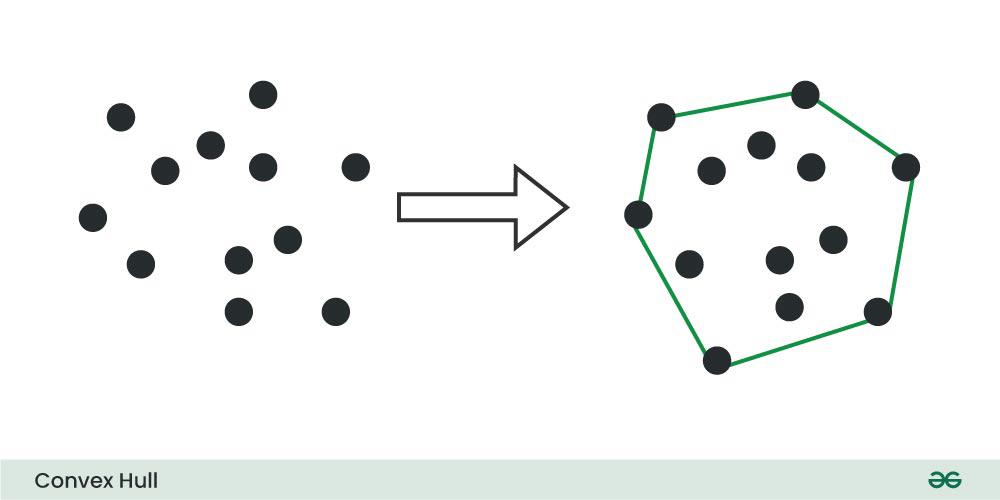
Convex Hull
- Consiste en una malla que define la envoltura convexa de un objeto
- Cara de computar
- Se adapta bien a casi todos los casos
- Se usa el mismo cálculo de colisión que el de entre triángulos
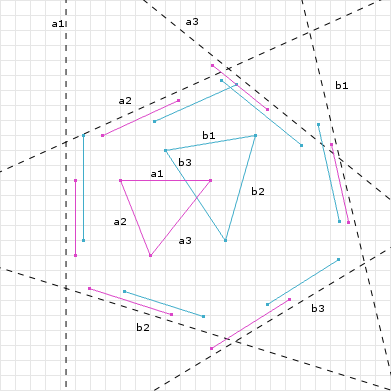
Triángulos
- Es la forma más usada en las simulaciones realistas.
- Se usa para conseguir una interacción precisa.
- Se suele combinar con otras técnicas (AABB y CH) para hacerlo eficiente
- Se usa el Separating Axis Theorem para calcular la colisión